A stretchable fiber with tunable stiffness for programmable shape change of soft robots
Ragesh Chellattoan and Gilles Lubineau
Soft Robotics (Accepted, 2021)
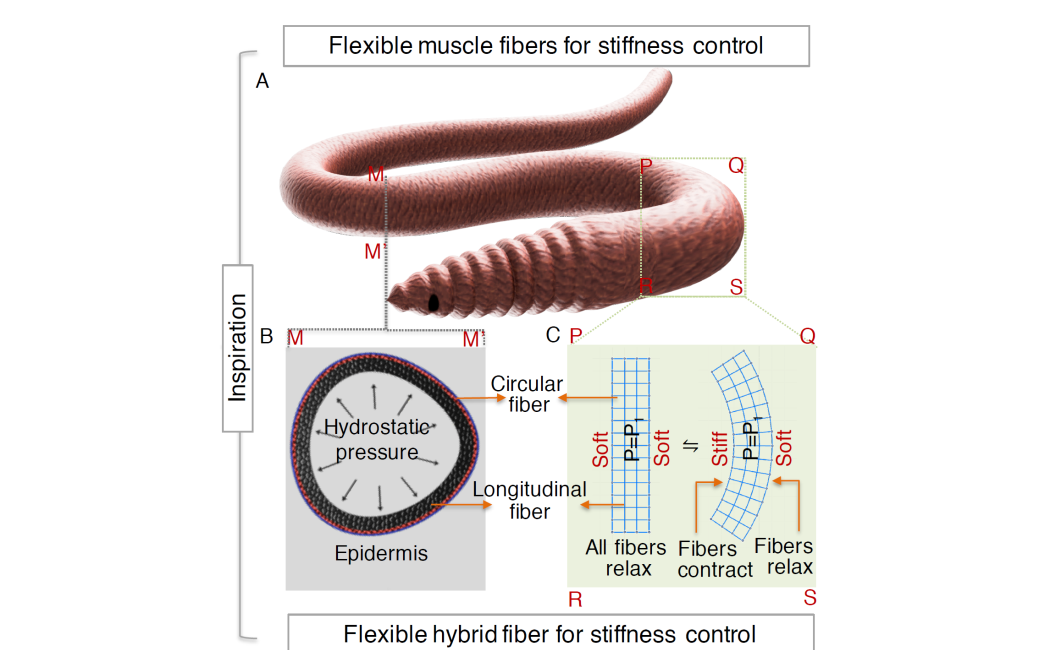
All soft robots require the same functionality, i.e., controlling the shape of a structure made from soft materials. However, existing approaches for shape control of soft robots are primarily dominated by modular pneumatic actuators, which require multi chambers and complex flow control components. Nature shows exciting examples of manipulation (shape change) in animals, such as worms, using a single-chambered soft body and programmable stiffness changes in the skin; controlling the spatial distribution of changes in stiffness enables achieving complex shape evolutions. However, such stiffness control requires a drastic membrane stiffness contrast between stiffened and nonstiffened states. Generally, this is extremely challenging to accomplish in stretchable materials. Inspired by longitudinal muscle fibers in the skin of worms, we developed a new concept for fabricating a hybrid fiber with tunable stiffness, i.e., a fiber comprising both stiff and soft parts connected in a series. A substantial change in membrane stiffness was then observed by the locking/unlocking of the soft part. Our proposed hybrid fiber cyclically produced a membrane stiffness contrast of more than 100� in less than 6 s using an input power of 3 W. A network of these hybrid fibers with tunable stiffness could manipulate a single-chambered soft body in multiple directions and transform it into a complex shape by selectively varying the stiffness at different locations.
Soft robotics, Stretchable fiber, Tunable stiffness, Shape change.